Трехосевой настольный гироскоп своими руками
MPU-6050 — гироскоп — акселерометр
Трехосевой гироскоп с трехосевым акселерометром MPU-6050 очень доступен по цене, чем и приобрел себе популярность. Этот датчик применяется для определения положения в пространстве, в системах стабилизации положения, стабилизации прямолинейного движения и движения по заданной кривой. Например, в балансирных роботах, в игровых приставках, применяется в робототехнике, для измерения углов наклона, скорости вращения, в авиамоделизме его применяют в автопилотах. Датчик может применяться для измерения перегрузок и тому подобное.

Схема подключения

Для Raspberry Pi (OS: Raspbian) примеры скриптов можно скачать и развернуть так:
Калибровка
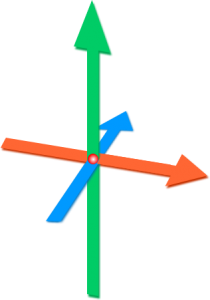
На самом деле присутствуют и другие погрешности. Например, трехосевые датчики должны располагаться взаимно перпендикулярно. Но при производстве трудно добиться абсолютной точности, поэтому этот угол также имеет определенные допуски и влияет на погрешность. Кроме того показания датчиков с трех осей могут иметь разную пропорциональность. В данном случае наибольшая погрешность из-за смещения относительно нуля.
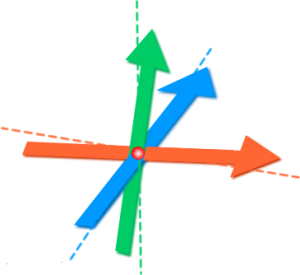



Гироскоп
Для тех, кто ранее был знаком с механическими гироскопами, могут возникнуть некоторые неопределенности. Дело в том, что механические гироскопы стабилизируются в пространстве за счет своих физических свойств. Электронные гироскопы этого делать не могут, они лишь измеряют скорость вращения вокруг осей и ничего не могут сообщить о текущем положении системы.
С помощью электронного гироскопа можно определить положение системы следующим образом. При включении принять начальное положение за нулевую позицию. Затем опрашивать гироскоп с заданным интервалом, зная интервал и скорость вращения, вычислять смещение и добавлять к текущему положению. При этом мы предполагаем, что между двумя опросами датчика система поворачивалась с постоянной скоростью. Такой подход ведет к неизбежному накоплению ошибки. Что видно на примере. Смотри работу скрипта: mpu5060_gyro.py или скрипта, графически отображающего положение гироскопа pyplay_gyro.py.
Акселерометр
Когда мы поворачиваем датчик в пространстве, показания акселерометра на каждой из трех осей будет изменяться в зависимости от положения. Так, с помощью трехосевого акселерометра под воздействием силы тяжести можно определить положение системы. См. работу скрипта mpu6050_accel_no_filter.py.
Мы видим, что значения достаточно зашумлены. Попробуем их фильтровать. Я применил очень упрощенный фильтр Калмана. См. работу скрипта mpu6050_accel_kf.py. Показания стали более стабильными, однако в нашем случае фильтр малополезен. Если датчик потрясти, мы увидим, что показания углов изменяются и иногда очень сильно, хотя мы его не поворачиваем, а перемещаем с ускорением вдоль осей. Это логично, поскольку на акселерометр теперь кроме силы тяжести действует дополнительная сила, и результирующий вектор изменяет направление. Наглядно это видно на примере скрипта pyplay_accel.py (в этом скрипте фильтрация не используется). Здесь простая фильтрация только частично улучшает ситуацию. В решении этой проблемы нам поможет гироскоп. Именно он может нам сказать, что система-то не вращалась, и поэтому мы можем эти колебания отфильтровать.
Совместное использование гироскопа и акселерометра


См. работу скрипта mpu6050_final.py или скрипта pyplay_final.py, который графически изображает процесс работы MPU-6050
MotionApps
Кто использует Arduino, тоже без труда найдут в интернете аналогичные примеры.
В особенности работы MotionApps я не вникал. Думаю, это тема для отдельной статьи. Меня больше интересовала собственная реализация на Python.
Управление компьютером без рук (гироскоп мне в темя!)

В предыдущей статье я рассказал, как можно управлять компьютером при помощи глаз. Несмотря на то, что в ряде случаев отслеживание положения зрачков (eye gaze tracking) — единственный способ предоставить больному человеку возможность общаться с окружающим миром, описанная ранее система не лишена недостатков. Прежде всего, это необходимость использовать компоненты, которые трудно приобрести в России. Кроме того, человеку в очках приходится сильно ограничивать положение головы, чтобы свести к минимуму паразитные блики на поверхности очков и достичь стабильной работы системы.
А можно ли использовать что-нибудь попроще и понадёжнее, если человек способен двигать головой, но испытывает трудности при работе руками?
-= Обновление января 2019 года =-
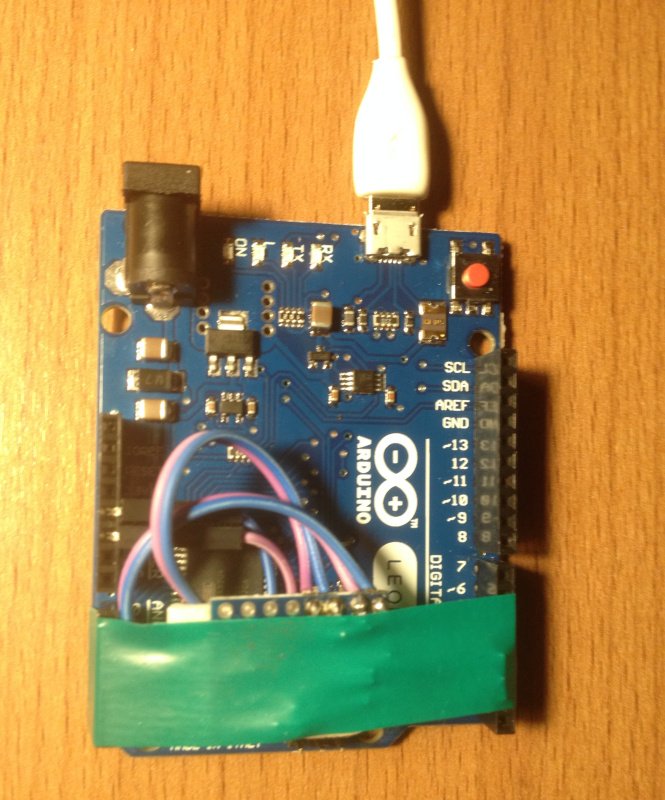
Описываемый в статье пульт Upvel UM-510KB уже невозможно купить, но вместо него для отслеживания поворота головы можно использовать вот такую схему, собраную из Arduino Leonardo и модуля GY-521 с гироскопом/акелерометром MPU-6050.
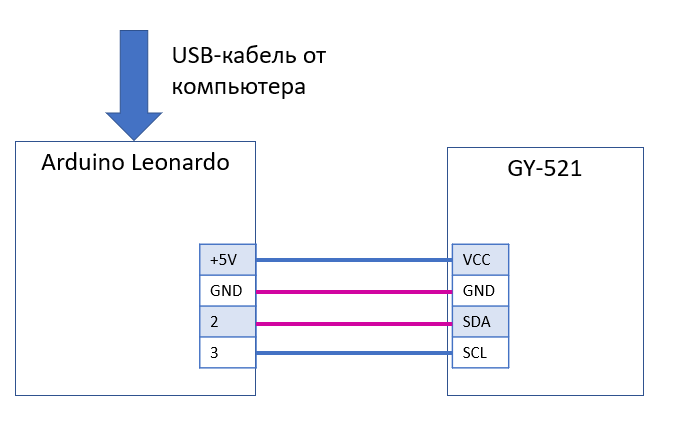

Arduino Leonardo и GY-521 соединяются четырьмя проводами. По возможности припаяйте их.
У меня получился вот такой прототип. Естественно, по-хорошему нужно всё это облагородить/поместить в корпус.
 |
 |


Программа (скетч), которую нужно загрузить в Arduino, выглядит вот так:
Для компиляции скетча также необходимо скачать библиотеки I2Cdev и MPU6050. Взять их можно вот отсюда: github.com/jrowberg/i2cdevlib/tree/master/Arduino
После загрузки скетча собранное устройство действует так же, как и пульт из статьи. То есть вы меняете ориентацию устройства в пространстве, а курсор мыши на экране двигается.
-= далее — оригинал статьи=-
А можно ли использовать что-нибудь попроще и понадёжнее, если человек способен двигать головой, но испытывает трудности при работе руками?
Конечно, такие средства существуют. Прежде всего, это программы, которые используют обычную веб-камеру для контроля за поворотом головы и некоторыми другими действиями, такими как моргания глаз и движения губ (читайте про них ниже, в разделе «А стоит ли овчинка выделки?«).

Кроме того, выпускаются и специализированные устройства, которые также представляют из себя камеры, следящие за маркерами, ярко светящимися в инфракрасном диапазоне. Маркеры крепят куда-нибудь в район головы, например, на оправу очков, кепку, гарнитуру. Иногда даже рекомендуют приклеить маркер на лоб.

Различные фирмы, которые ранее производили устройства такого типа, постепенно собрались под крылом компании NaturalPoint. И теперь у них на сайте можно найти устройства, которые раньше конкурировали, а теперь просто делят разные сегменты рынка. Так, например, вариант попроще (TrackIR) они предлагают для геймеров, а подороже (SmartNav) — для работы за компьютером.
И без того недешёвый SmartNav ($500) становится просто золотым, когда пытаешься приобрести его в России. Поэтому возникла идея сотворить нечто, что могло бы не хуже позиционировать курсор на экране компьютера, но при этом было бы доступнее.
Поначалу хотелось использовать тот же принцип работы: маркеры, подсветка, обработка изображения. Но приходили мысли и о прямых измерениях. Вплоть до того, чтобы приделать к голове электронный штангенциркуль (почти шутка).

Как впоследствии оказалось, такие приборы действительно существуют!
Посмотрите-ка вот на это чудо инженерной мысли — рычаг, который нужно держать ртом, и управлять им движениями головы!
Неожиданно появилась идея использовать [электронный] гироскоп. Они в последнее время стали доступны и весьма точны. Готовые устройства типа «аэромышь», правда, не получили большого распространения. Например, мышь Logitech MX Air уже снята с производства, видимо, из-за отсутствия спроса.
Существуют программы для смартфонов (как iPhone, так и Android), которые позволяют использовать их в качестве аэромыши, задействуя встроенные в них гироскопы. Но глубоко этот вопрос я не исследовал, так как интересовало, прежде всего, дешёвое решение.
Наконец в поле зрения попали пульты для мультимедия-приставок к телевизорам, также использующие встроенный гироскоп. Некоторые из них работают и с обычным компьютером, достаточно лишь вставить адаптер в USB-гнездо. Передача данных происходит по радиоканалу, то есть не требуется прямой видимости пульта, как в случае с инфракрасными приёмопередатчиками.
Пульт закрепляется на голове, и при её повороте курсор мыши на экране движется (как у Чебурашки в заголовке статьи). Остаётся только разобраться с нажатиями на кнопки мыши и виртуальной клавиатурой. Для этих целей я написал свою программу.
Сложность представляет следующий момент: пульты «засыпают» после некоторого периода бездействия, и пробуждать их нужно нажатием на кнопку, что может быть сложно для использующего их человека.


Пришлось поставить ряд экспериментов — зажимать одну из кнопок на клавиатуре и оставлять пульт в бездействии, надеясь, что нажатая кнопка не даст пульту заснуть. Причём зажимать кнопку приходилось прищепкой, а не рукой, так как рука могла передавать пульту небольшие движения. Кнопки же можно было нажимать только те, которые не используются в Windows.
Некоторые пульты победить не удалось, но в конце концов был найден пульт Upvel UM-510KB, который гарантированно не засыпает при удержании пары кнопок.
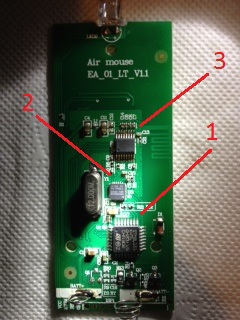

Если вскрыть этот пульт, то внутри можно найти микроконтроллер STM8L-151 от STMicroelectronics (1), трёхосевой гироскоп Invensense MPU-3050c (2) и ещё какой-то безымянный чип (3) для общения с USB- адаптером на 2.4 ГГц. Также виден инфракрасный светодиод. Он нужен, если вы хотите использовать пульт для переключения программ и регулировки громкости на телевизоре. При общении с компьютером светодиод не используется, поэтому его можно смело загораживать.
Конечно, красивым решением было бы прочитать, дизассемблировать и модифицировать программу микроконтроллера, а затем перепрошить его, чтобы пульт не засыпал, а не закорачивать кнопки. Но с этой областью я не знаком, оставляю такую возможность энтузиастам.
Пульт с постоянно нажатыми кнопками прожорливо потребляет электроэнергию. Поэтому пришлось припаять к нему блок питания, чтобы каждый день не менять батарейки.
Переделка шаг за шагом
Прежде всего отмечу, что то, что у меня всё заработало, не значит, что оно заработает у вас. Если производитель, например, поменяет прошивку, то замыкание двух кнопок может оказаться бесполезным. Однако, надеюсь, что прошивку менять никто не будет за ненадобностью.
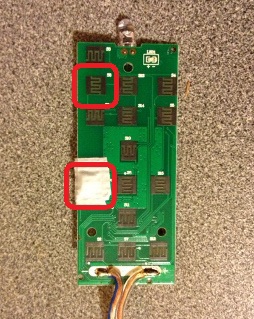
Итак, вскрываем пульт. Ковыряем отверткой, пока он не откроется, немного повредив корпус. Затем, вынимаем плату и замыкаем ему две кнопки (см. фото). Можно паяльником, зачистив плату, но я просто приклеил армированным скотчем кусочки фольги от конфет.
Подпаиваем питание от трёхвольтового стабилизированного источника питания.
По вкусу заливаем клеем, чтобы провод держался в корпусе прочно.
 |
 |
 |
| Замкнуть ДВЕ (!) кнопки в указанных местах. Внимание! Изначально фотография содержала ошибочно помеченные кнопки! Нужно замыкать кнопку «Set» и кнопку с четырьмя квадратиками, расположенную слева от «ОК» | Укрепить провод | В сборе |


Как удерживать пульт на голове? Можно просто положить пульт на голову и сверху надеть шерстяную шапочку. Так я поначалу и делал. Но для долговременного использования можно пришить кармашек к какому-нибудь головному убору.


Точного положения пульта относительно головы не требуется. Если курсор мыши находится не там, где вы бы хотели, просто поворачивайте голову так, чтобы курсор начал упираться в край экрана. Это сдвинет курсор в сторону, противоположную вращению головы. Короче говоря, попробуйте, и всё станет понятно без объяснений.

А стоит ли овчинка выделки?
Уже после того, как всё было сделано, я решил для сравнения попробовать программы, которые используют обычную веб-камеру для управления мышью без рук. Каково же было моё удивление, когда все они отлично заработали! Если ничего другого под рукой нет, рекомендую ими воспользоваться.
Попробовал же я такие программы (все бесплатные):
- eViaCam
- Head Mouse
- Camera Mouse
Лично мне больше всего понравилась программа eViaCam, но это — чисто субъективное, поверхностное мнение, основанное на недолгом использовании с настройками по умолчанию, и с той веб-камерой, которая есть у меня. Вам, возможно, понравится совсем другая программа.

Чтобы оценить преимущества использования гироскопа над чисто программными решениями, я написал программу, в которой нужно перемещать курсор вслед за появляющимися на экране квадратиками. При этом курсор мыши должен остановиться (зафиксироваться) над квадратиком хотя бы на 0.2 секунды.

Показывается два квадратика: красный — куда нужно вести мышь, и зелёный — то место, куда переместится красный на следующем шаге.
Программа и её исходный код доступны на https://github.com/MastaLomaster/CStest
В результате были получены следующие времена перемещения курсора по 25 квадратикам 40×40 пикселов (косвенно более высокая скорость свидетельствует также о большей точности позиционирования):
| обычная мышь в руке | 28.3 секунды |
| пульт с гироскопом на голове | 36.7 секунды |
| eViaCam | 58,3 секунд |
| Head Mouse | 66,3 секунды |
| Camera Mouse | 48,4 секунды |
Скорость набора текста на виртуальной клавиатуре менее показательна. Дело в том, что клавиатура требует, чтобы курсор мыши «зависал» над клавишей в течение продолжительного времени (около секунды). Иначе возможны ложные нажатия. Тем не менее, привожу данные и по набору текста. Я набирал текст «Управление компьютером без помощи рук» и это заняло у меня:
| обычная мышь в руке | 1 минута 15 секунд |
| пульт с гироскопом на голове | 1 минута 23 секунды |
| eViaCam | 1 минута 31 секунда |
| Head Mouse | 1 минута 44 секунды |
| Camera Mouse | 1 минута 28 секунд |
Camera Mouse — мне понравилась меньше всего, из-за того, что курсор у неё не стоит на месте, а дёргается. Но скорость набора текста в ней получилась неплохая.
Использовалась программа, которую я написал для работы с устройством слежения за глазами Tobii REX, а впоследствии модифицировал для поддержки любого устройства, перемещающего курсор по экрану, в том числе аэромыши.
Сама программа и её исходный код доступны здесь: https://github.com/MastaLomaster/bkb
Иллюстрация работы программы с устройством слежения за глазами — здесь: http://www.youtube.com/watch?v=O68C4d2SNC8
С другими устройствами программа работает точно так же, только курсор перемещается не от движения глаз, а, например, от поворота головы с гироскопом.
Стоит ли всё-таки выбрасывать около тысячи рублей за пульт, блок питания, провода, да ещё время терять, если есть бесплатные программы, с которыми тоже можно работать, да ещё к голове ничего цеплять не нужно?
На мой взгляд, использование пульта даёт следующие преимущества:
- Быстрая реакция курсора. вплоть до того, что можно играть в динамичные игры
- Предсказуемость. То есть повернув голову на привычный угол, вы увидите, что курсор переместился на привычное место
- Независимость от условий освещения и вообще от того, что в кадре появились новые лица/предметы.
Собираем самодельный квадрокоптер
Сделать самодельный квадрокоптер своими руками не сложно. Это гораздо проще, чем, к примеру, сделать самодельную авиамодель или радиоуправляемый вертолет.
Основа самодельного квадрокоптера — это рама. Ее можно купить готовую или сделать своими руками.
Самый простой вариант — купить готовую раму.
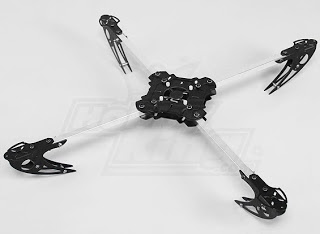

Рама Hobbyking X525 V3
Габариты: 600 мм
Материалы:
Ноги и центр. часть: текстолит
Лучи: алюминий
Цена: 550 рублей
- Купить раму квадрокоптера можно тут .
Преимущество готовой рамы над самодельными в том, что все уже подготовлено для установки электроники и не надо искать материалы для изготовления.
Впрочем, раму для самодельного квадрокоптера можно сделать своими руками из практически любых материалов.

Вот, к примеру, квадрик изготовленный из линеек и пеноплекса (пенопластовый утеплитель).

А этот самодельный квадрокоптер сделан из пластиковых труб для водопровода.
Причем, такие самодельные квадрокоптеры летают ничуть не хуже заводских!

Если вы хотите сделать красивый и оригинальный квадрокоптер — то смотрите эту статью. В ней вы найдете чертежи квадрокптера как на фотографии выше и подборку электроники для него.
Но рама в четырех моторных агрегатах — не главное! Главное в них это мозги — плата управления с гироскопами, магнитометром и бародатчиком.
Давайте посмотрим, какую плату можно поставить на квадрокоптер сделанный своими руками.
%5B1%5D.jpg)

HobbyKing KK
- Купить плату квадрокоптера можно тут .
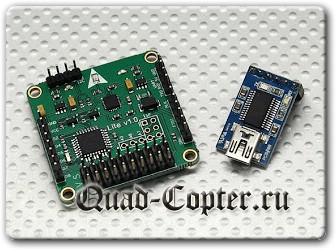
MultiWii Lite V1.0
Цена: 960 рублей
- Купить плату квадрокоптера можно тут .
Достоинства MultiWii Lite V1.0 — небольшие размеры, всего 40х40 мм и вес 9 грамм. В комплекте идет программатор для подключения к USB порту компьютера.
Эта плата управления квадрокоптером идеально подходит для изготовления небольших квадрокоптеров своими руками.
%5B1%5D.jpg)
MultiWii 328P
ITG3205 Трехосевой гироскоп
BMA180 Акселерометр
BMP085 Барометр
HMC5883L Магнетометр
Цена: 1050 рублей
- Купить плату квадрокоптера можно тут .
MultiWii 328P — это наиболее оптимальная по отношению цена/качество плата управления.
Программатор вшит в плату, акселерометр позволяет компенсировать дрейфы гироскопов, бародатчик — автономно висеть на заданной высоте, а магитометр (фактически компас) включать режим управления, когда коптер может лететь по прямой вращаясь вокруг своей оси.
Такое сочетание датчиков позволяет не только полностью автономно контролировать квадрокоптер, но и управлять гироподвесом камеры держа ее параллельно горизонту при любых эволюциях самодельного квадрокоптера.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, кроме платы управления не малую роль играют регуляторы оборотов электродвигателей.
Рекомендуется покупать специальные регуляторы для квадрокоптеров — Turnigy MultiStar, их не надо дополнительно перепрошивать.
Для самодельного квадрокоптера размерами 450-600 мм подойдет следующие регуляторы:
%5B1%5D.jpg)
Turnigy Multistar 30 A
Цена: 450 рублей
Купить регулятор можно тут .
Turnigy Multistar 20 A
Цена: 360 рублей
Купить регулятор можно тут .
Для 450-500 мм квадрокоптера берем 20 амперные регуляторы, а для 500-600 на 30А.
Впрочем, если поставить регулятор на 30А вместо 20ти амперного, то он просто будет меньше греться. Токопотребление задают моторы.
Двигатели для самодельного квадрокоптера

Turnigy Aerodrive SK3 2822-1275
Цена: 570 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 20 А.
%5B1%5D.jpg)
NTM Prop Drive Series 28-30S
Цена: 580 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.

Turnigy Multistar 2216-800Kv
Цена: 990 рублей
Купить мотор для квадрокоптера можно тут .
Под регулятор на 30 А.
Похожие статьи:
Фактически можно ставить любой полетный контроллер.
На сегодняшний день наиболее хорошо отзываются о Naza.
Для автовозврата квадрокоптера при потере связи нужна плата с поддержкой модуля GPS и сам модуль.
Если не отлетать дальше 100 метров и использовать только режим «ручного управления» — то подойдет любой.
Если предполагается «удержание точки висения в автоматическом режиме» то посоветую Naza Lite с GPS или Naza V2 с GPS.
Multiwii и Megapirate — контроллеры хорошие, к ним можно подключать GPS, но в настройках надо разбираться и поднастраивать под свой квадрик. Не слишком сложно, но пару дней займет.
Та же Наза фактически «летает из коробки», за что ее и любят, не смотря на более высокую цену.
Добрый день!
КвадроЛетчик, хочу сам собрать квадрокоптер, но есть жесткие требования к нему:
Должен получиться достаточно мощный квадрокоптер, который не сносит ветер, с дальностью управления около 1 км, с GPS и можно будет использовать камеру с высоким качеством съемки.
Готовые стоят космически дорого. Хочу сам собрать из комплектующих.
Вы можете мне посоветовать, как мне нужны запчасти: рама, моторчики, «мозги», аккумулятор и т.д.
Заранее спасибо!
el_moby@mail.ru
Там коллекторные двигатели (2 провода), их хватает примерно на 100 полетов. Потом менять. Впрочем, часто и после 15-20 полета один из двигателей — под замену.
Коллекторные регуляторы сделаны прямо на плате.
В DJI Phantom 3 — та же история, регуляторы на плате, если сдохнет регулятор (бывает при падении, мотор не отключился уперся винтом и регулятор сгорает), менять придется всю плату.
Все разговоры о регуляторах, почему и как, а так же подбор электроники предлагаю вести только в коптероном форуме. Тут такие сообщения будут удаляться.
Здравствуйте! Подскажите, пожалуйста, можно ли вместо MultiWii 328P, использовать MultiWii SE v2.5 ? Насколько сильно они отличаются?
А если использовать APM 2.6? Насколько сложно будет его настроить? Стоит ли его брать?
Можно, но лучше обратиться к тем, кто это делает на проф. основе. Так как потребуется доступ к ЧПУ станку или 3Д принтеру.
Современные GPS/ГЛОНАСС приемники вполне позволяют получить зависание в одной точке.
Для компенсации порывов ветра необходим 3Д подвес.
Подбирать комплектующие необходимо комплексно, обычно начинается с того, что решается какую камеру катать. Затем — рассчитывается масса подвеса (берется готовый или делается самостоятельно), От веса подвеса с камерой стартуется обсчет самого квадрокоптера.
Надо учесть — будет ли 8 моторов на 4-х осях (защита от падения при поломке любого из моторов) или упростить конфигурацию (и удешевить ее) до стандартных 4-х моторов.
Под конфигурацию побираются моторы, регуляторы, аккумуляторы, выбирается полетный контроллер (минимальные настройки или максимальный ручной тюнинг настроек), делаются чертежи и по ним приступают к изготовлению деталей и сборке.
По сути — процесс сборки это рутина. По времени, 90% тратится на подготовительный этап.
Встал вопрос создания 3D модели участка местности с сеткой точек 1м х 1м. Участок 223 Га с перепадами высот по гугл карте от +40 до +140 (холмы). Так как проект не коммерческий, то хочу обойтись своими силами и собрать свой коптер.
Подскажите пожалуйста на какие модели деталей (желательно не шипко дорогие) нужно обратить внимание?
По функциям дрона хотелось бы иметь:
1. Авто взлет
2. Авто посадка
3. Возврат по низкому заряду батареи или нештатной ситуации.
4. Программируемость маршрута и высоты полета (т.е. возможность задания сетки точек для облета до полета.)
5. Камера 4К (или возможность нести на себе аналог Гоупро или Wifi IP камера)
6. Авто Облет препятствий.
7. Дальность 3-5км с обратной связью (в процессе полета видеть что он там снимает и писать на внешний источник поток видео с дрона)
8. Время в полете от 30 минут
9. GPS
10. Возможность записи высот по точкам облета. (высоты над ур. моря точки на земле)
И еще есть пылесосы которые умеют парковаться на базу и заряжаться.
Вопрос. А квадрокоптеры есть такие, которые умеют самостоятельно парковаться на базу для подзарядки??
(это чисто моя фантазия. На стройке для хозяина удобная фишка. Прям с компа стартовать дрон и смотреть за стройкой. или автоматизация охраны, сработал датчик движения и двон стартовал посмотреть и записать что там шевелится. )
Миниатюрный, точный и доступный гироскоп для навигации без GPS
Миниатюрный, дешевый и высокоточный гироскоп, разработанный в Мичиганском Университете, может помочь беспилотным летательным аппаратам и автономным автомобилям оставаться на трассе без сигнала GPS.
“Наш гироскоп в 10000 раз точнее, но только в 10 раз дороже, чем гироскопы, используемые в ваших типичных мобильных телефонах. Этот гироскоп в 1000 раз дешевле, чем гораздо бóльшие по габаритам сенсоры с аналогичными характеристиками», – сказал Халил Наджафи, профессор инженерии Мичиганского Университета и профессор электронной инженерии и компьютерных наук.
Большинство смартфонов содержат сенсоры – гироскопы для определения ориентации экрана и помогают электронному устройству определять направление поворота, но точность их низкая. Именно по этой причине телефоны часто неправильно указывают, в каком направлении смотрит пользователь во время работы в навигационных приложениях.
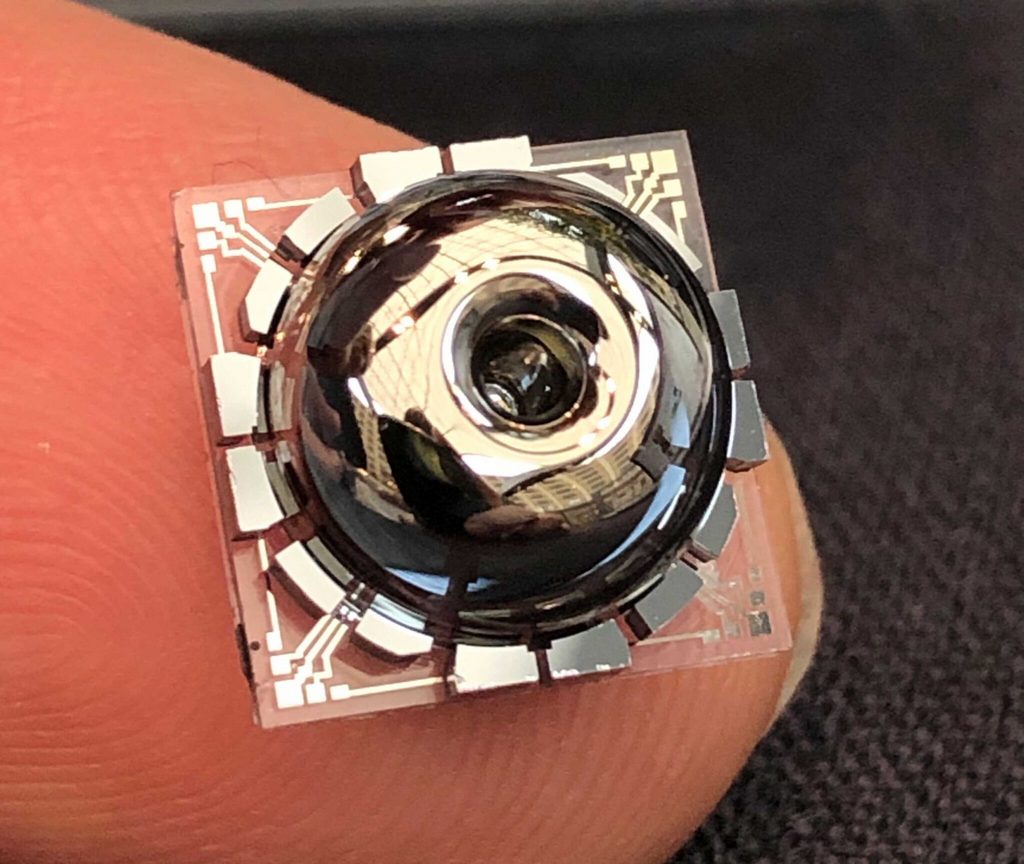 |
| Резонатор гироскопа с электродами, расположен на пальце для понимания масштаба. Резонатор практически идеально симметричен, изготовлен из стекла с минимальным содержанием примесей. Это позволяет ему вибрировать в течении долгих периодов, подобно звону бокала. |

Это не имеет большого значения для человека на улице или за рулем, но автомобиль без водителя может быстро «потеряться» при исчезновении сигнала GPS. В настоящее время в резервных навигационных системах автономных автомобилей используются высокопроизводительные гироскопы – это габаритные и дорогостоящие приборы.
«Высоэффективные гироскопы достаточно долгое время являлись узким местом в навигационных системах. Представленный прибор может устранить это препятствие, позволяя использовать высокоточную и бюджетную инерциальную навигацию в большинстве автономных транспортных средств», – сказал Чже Йонг Чо, помощник научного сотрудника в области электронной инженерии и информатики.
Такого рода резервное навигационное оборудование может также использоваться военными при поиске путей в местах, где сигналы GPS заблокированы. Или в более приземленном сценарии: точная навигация внутри зданий и помещений может ускорить работу складских роботов.
Устройство, обеспечивающее навигацию без соответствующего ориентирующего сигнала, называется инерциальным измерительным модулем (inertial measurement unit, IMU). Такой модуль состоит из трех акселерометров и трех гироскопов, по одному на каждую ось в пространстве. Но получить точную информацию о том, как вы двигаетесь, с существующим IMU настолько дорого, что это вышло за пределы допустимого диапазона даже для такого дорогостоящего оборудования, которое применяется в автономных транспортных средствах.
Ключом к созданию этого доступного миниатюрного гироскопа является практически идеально симметричный резонатор. Он похож на форму для выпечки кекса скрещенную с бокалом для вина, выполненную в размере 1 см. Как и в случае с бокалами, длительность звуковых колебаний при ударе по стеклу зависит от качества стекла, но в данном случае вместо эстетической особенности звуковые колебания имеют решающее значение для работы гироскопа. Завершенное устройство использует электроды, расположенные вокруг стеклянного резонатора, чтобы сжимать и растягивать стекло, тем самым заставляя его вибрировать и поддерживать профиль вибрации.
«По сути, стеклянный резонатор вибрирует по определенной схеме. Если вы вдруг повернете его, вибрационная диаграмма захочет остаться в своей первоначальной позиции. Таким образом, отслеживая характер вибрации, можно непосредственно измерять частоту вращения и угол поворота», – сказал Саджал Сингх, докторант в области электронной и компьютерной инженерии, который помог разработать технологический процесс.
То, как вибрации движутся сквозь стекло, показывает, когда, как быстро и как вращается гироскоп в пространстве.
Чтобы сделать резонатор настолько совершенным, насколько это возможно, команда Наджафи начинает с листа почти идеально чистого стекла, известного как плавленый кварц, толщиной около четверти миллиметра. Они используют горелку для нагрева стекла, а затем формируют его в виде формы для выпечки кекса – это Birdbath-резонатор (резонатор «птичья ванна», т.к. он также напоминает перевернутую птичью ванну).
 |
| Новый миниатюрный высокоточный гироскоп в вакуумном прозрачном корпусе |

Затем на стеклянную оболочку наносится металлическое покрытие, а вокруг размещают электроды, которые инициируют и измеряют вибрации в стекле. Все это заключено в вакуумный корпус размером с почтовую марку высотой пол сантиметра, который не позволяет воздуху быстро гасить вибрации.
Документ, озаглавленный «Случайный уход угла 0.00016 град/√ч (ARW) и нестабильность смещения 0.0014 град/ч прецизионного гироскопа с интегрированной оболочкой 5.2M-Q и 1-cm» был представлен 25 марта на виртуальном 7 международном симпозиуме IEEE по инерционным датчикам и системам.
Исследование было поддержано Агенством перспективных исследований в области обороны.
Ученые Чже Йонг Чо и Халил Наджафи являются соучредителями новой компании Enertia Microsystems, основанной на технологиях, лицензированных у Мичиганского Университета.
Перевод: Vadim по заказу РадиоЛоцман
Трехосевой настольный гироскоп своими руками


- Радиоуправляемые Авиамодели
- Мастерская
- Авиамодельный форум
- Блоги
- Войти
- Регистрация
Подписываемся на VK
Ежедневные новости, видео и приколы.
YouTube канал


Подбор двигателя
Меню сайта
- Радиоуправляемые авиамодели
- Новичку
- Обзоры
- Технологии
- Авиамодельные
- Компьюторные
- Модернизация
- Починка
- Очумелые ручки
- Оборудование
- 3D принтер
- Игры и симуляторы
- Игры
- Симуляторы
- Книги
- Чертежи
- Чертежи авиамоделей
- Чертежи плосколетов
- Не стандарт
- Бумажные модели
- Видео инструкции
- Три и квадрокоптеры
- Инструкции к квадрокоптерам
- Tiny Whoop
- FPV аппаратура
- Радиоуправляемые яхты
- Принадлежности
- Авиамодельный Форум
- Статьи в блогах
- Новости
- Изготовление авиамоделей
- Фотоинструкции
- Обзоры изготовления
- Моделизм
- RC оборудование
- Автопилоты
- Зарядные устройство
- Приспособы
- Развлекушки
Магазин
- Модели по Тетрис
- Модели из ЕПП
- Авиамодели из теплона
- Рамы квадрокотпера
- Кит стартового ящика
- Защита от улета
- Модели из композита
- AstrA
TOP статьи

Оборудование
- Передатчики
- Двигатели
- Зарядные устройства
Плосколеты
- Делаем Плосколет
- Объемный Плосколет
- Плосколет с толкающим винтом
- Крестолет из потолочки
- 4-х моторник
- Чертежи плосколетов
Создание авиамоделей
- Фотоинструкции
- Cessna 150
- Cessna 152 +закрылки
- Сам5Бис2
- «Рама» для FPV
- Чирок низкоплан
- Изготовление Crazy Pig
- Полукопия DHC-2 Beaver
- Бутербродный Mustang P-51D
- Katana 3D
- Ultron 3D
- Слойка-С
- Биплан Manon 3D
- Биплан Ultimate
- Птиц — мелколет
- Тренер в 64 см
- Минипланер
- Полукопия Як-3
- Go-Go Dancer для FPV
- IKAR1600 для FPV
- Видеоинструкции
- 3 авиамодели
- Авиамодель Тренер
- Messerschmitt Bf.109
- Летающий Картинг
- Обзоры изготовления
- Бутылочная технология
- Делаем Slow Stick
- Фламинго верхнеплан
- Из микромашинки
- Мультяшная авиамодель
- Планер из потолочки
- Снежинка
- Shark Bait
- Shark Bait Биплан
- Слойка 3D
- Делаем ЛК
- ЛК Вжик
- ШокФлаер Як 55
- GoGo Dancer 1.2м
- Alula — слопер из потолочки
- Моторная Алула
- Питтс Питон
- Строим полукопию
RC Магазины















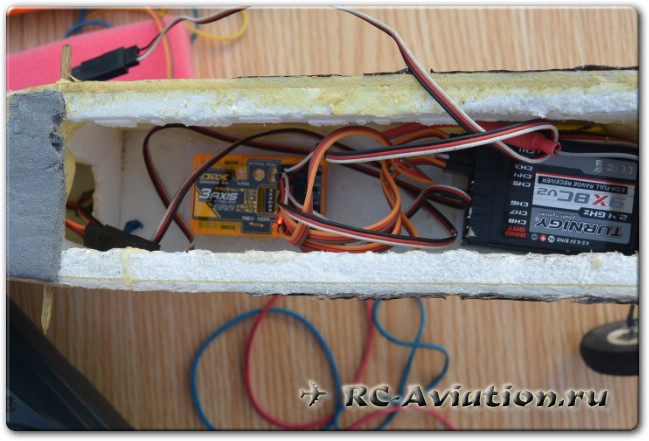
| Как летать не управляя или RX3S OrangeRX V2 |
| Обзоры — Комплектующие авиамоделей |
| Автор: Administrator |
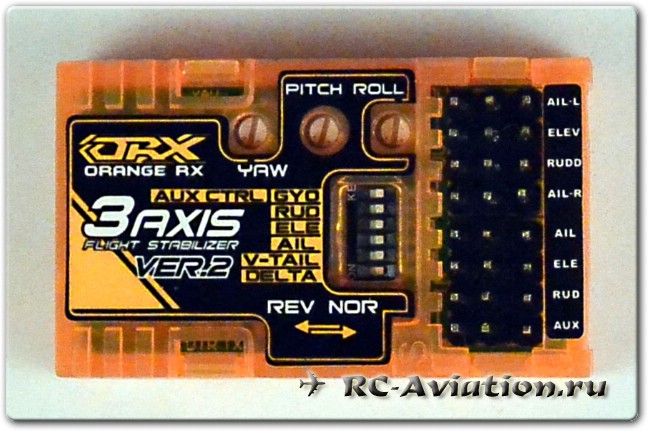
Обзор трехосевого стабилизатора полета RX3S OrangeRX V2Честно говоря, я не являюсь сторонником стабилизаторов полета на авиамоделях. Считаю, надо уметь управлять самостоятельно, а не отдавать все на откуп электроники. Электроника в любой момент может отказать и тога, если не владеешь навыками управления без гироскопов краш неминуем. Нет, для специфичных полетов, таких как FPV, видеосъемка, носитель какого либо оборудования, когда авиамодель является просто транспортным средством использование стабилизаторов полета, автопилотов и прочего облегчающего полет считаю необходимым. Так как в данном случае управление полетом не является самоцелью, всего лишь средство доставки. Да и квадрокоптеры не могут без гироскопов, им хотя бы простой, типа KK Multicopter нужен. Да и подвес для камеры необходим, если конечно цель — запись видео, а не сам полет. RX3S OrangeRX V2 у меня лежал «в запаснике» около года, пока до него наконец то не дошли руки 🙂 Но закончим вводную часть и перейдем к обсуждению трехосевого стабилизатора полета RX3S OrangeRX V2. Данный стабилизатор имеет на борту трехосевой гироскоп, точнее сказать трехосевой датчик измерения угловых отклонений, но в моделизме эти датчики называются гироскопами. Чем отличаются эти понятия смотрите в Википедии, а тут рассмотрим практику применения RX3S OrangeRX V2. Кроме помощи в управлении обычными авиамоделями классического типа, RX3S OrangeRX V2 может использоваться для стабилизации полета на авиамоделях с V-образным хвостовом и моделях типа «летающее крыло». Чувствительность гироскопов настраивается с помощью «крутилок». Трехосевой гироскоп — это не стабилизатор полетав чистом виде! Если вы направите модель в полет вертикально к земле, то он будет сохранять вертикальность при брошенных стиках передатчика и воткнет авиамодель в идеальной морковке! Гироскопы не выравнивают авиамодель в полете и не возвращают в точку старта, но, зато, позволяют летать в порывистый ветер и в задачу пилота будет входить только выбор направления полета, ровность выполнения всех фигур обеспечит эта желтая штуковина. Внимание! При выполнении фигур высшего пилотажа, таких как «блендер», «водопад» и тд. 3-х осевой гироскоп может больше мешать, чем помогать. Впрочем, если вы выполняете такие фигуры, то гироскопы вам не нужны! Но, если надо выполнить ровный пролет или идеальную петлю, то тут 3-х осевой гироскоп — это первый ваш помощник! Посмотрите видеообзор RX3S OrangeRX V2 и видео полетов с этим трехосевым гироскопом на авиамодели Cessna 150 в ветреный день под Переславлем.
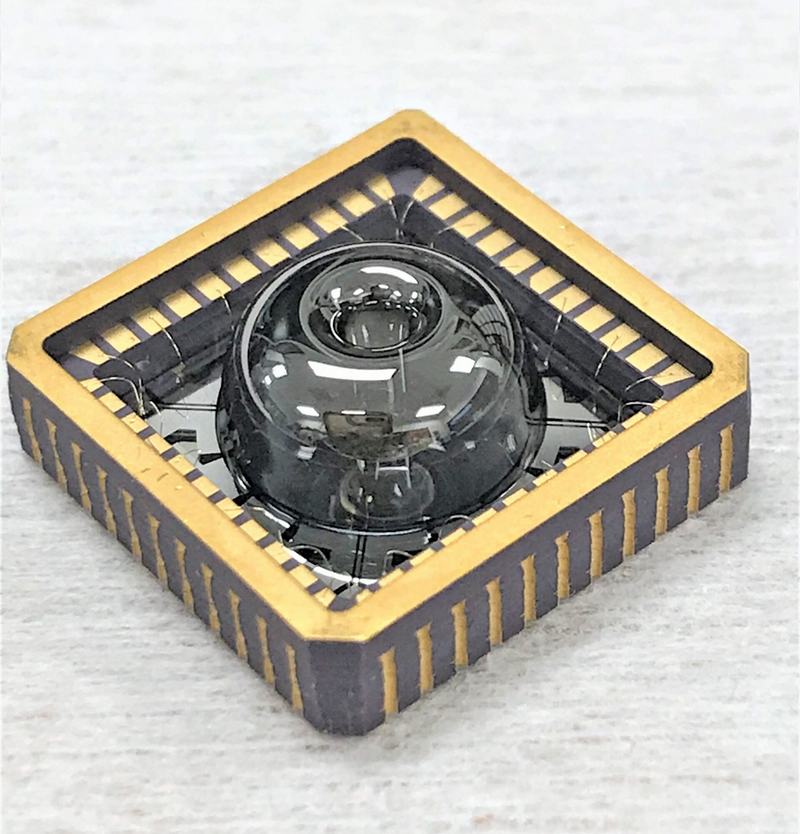
Как видите авиамодель летит ровно, как будто на улице полный штиль. Характеристики и настройка RX3S OrangeRX V2 Габариты: 44x26x14 мм В левой части трехосевого гироскопа располагаются штыри для подключения приемника и сервомашинок. Нижние 4 — AIL, ELE, RUD, AUX — подключаются от приемника, это элероны, руль высоты, руль направления и контроль чувствительности. Если канал AUX не подключен к приемнику, то может присутствовать «дрожание» на сервомашинках. Верхние — AIL-L, ELE, RUD, AIL-R — соответственно левый элерон, руль высоты, руль направления и правый элерон. Левый и правый элерон работают в противофазе и предназначены для подключения каждый на свою сервомашинку, если у вас используется Y-кабель, то можно выбрать любой из них. В верхней части RX3S OrangeRX V2 находятся регуляторы чувствительности по каждой оси гироскопа, можно настраивать различную чувствительность — например, сделать более чуткой по элеронам и загрубить по рулю направления, ну или в любом другом варианте, как того требует ваша авиамодель. Переключатели позволяют инвертировать оси гироскопа, это необходимо в тех случаях, когда трех осевой гироскоп отрабатывает «не в ту сторону». AUX CTRL | GYRO — это переключение возможности управления трехосевым гироскопом через канал от приемника. ELE, RUD, AUX — соответственно реверсирование каналов гироскопа. V-Tail — включение поддержки V-хвоста (заменяет руль направления и руль высоты) Delta — включение поддержки элевонов Летающего крыла (V-mix), в этом режиме RX3S OrangeRX V2 сам микширует каналы для ЛК, на передатчике режим V-mix должен быть отключен. Подсказка — если не получается реверсировать сервомашинки в нужную сторону — поменяйте их подключение местами. Купить 3-х осевой стабилизатор полета RX3S OrangeRX V2 : Паркфлаер , HobbyKing .Правда, есть и обратная сторона управления с гирой электроника будет удерживать модель до последнего, даже если скорость полета будет подходить к критической для сваливания, авиамодель продолжит ровный полет, а как скорости станет недостаточно то, бац! И авиамодель уже в земле! Без гироскопов выход на малую скорость можно заметить на неадекватному поведению авиамодели, а с RX3S OrangeRX V2 модель самолета будет лететь до последнего мгновения ровно. Ставить гироскопы на свою авиамодель решает каждый сам. Кто то благословит гиры и не понимает, зачем надо летать без них, кто то, наоборот считает, что гиры только портят полеты. Трехосевой настольный гироскоп своими рукамиЗа последние несколько лет широкое распространение по всему миру получили датчики, основанные на микроэлектромеханических системах, так называемых МЭМС. Популярность данных устройств обусловлена рядом причин, основными из которых являются простота их использования, относительно низкая цена и малые габариты. МЭМС-датчики, как правило, оснащаются интегрированной электроникой обработки сигнала и не имеют движущихся частей. Этим обуславливается их высокая надежность и способность обеспечивать стабильные показания в достаточно жестких условиях окружающей среды (перепады температур, удары, влажность, вибрация, электромагнитные и высокочастотные помехи). Совокупность данных преимуществ побуждает производителей систем для различных сфер применения (от авиа — и автомобилестроения до бытовой техники) использовать в своих разработках те или иные МЭМС-сенсоры. В данной статье будут рассмотрены МЭМС-датчики для измерения ускорения (акселерометры) и угловой скорости (гироскопы). Данные устройства активно используются в системах управления летательными аппаратами, для обеспечения безопасности движения автомобилей, в сельскохозяйственной технике, изделиях специального назначения и др. В настоящее время существует достаточно много различных решений по исполнению МЭМС-устройств. В их числе – одноосевой МЭМС-гироскоп с вибрирующим кольцом и трехосевой емкостной МЭМС-акселерометр. Одноосевой МЭМС-датчик угловой скорости (гироскоп) с вибрирующим кремниевым кольцом Данный кремниевый цифровой гироскоп разработан с учетом требований к низкой стоимости изделия и экономичному энергопотреблению для систем навигации и наведения нового поколения. Он способен измерять угловую скорость до ± 1,0 є/с и имеет два режима вывода: аналоговый сигнал напряжения, линейно-пропорциональный угловой скорости, и цифровой по протоколу SPI®. Режима вывода – аналоговый или цифровой – выбирается пользователем при подключении датчика к какой-либо системной плате. Главной отличительной особенностью гироскопа является применение технологии сбалансированного вибрирующего кольца в качестве датчика угловой скорости. Именно она обеспечивает надежную работу и точное измерение скорости вращения даже в условиях сильной вибрации. Возможны две основные конфигурации гироскопа, одна из них позволяет датчику измерять угловую скорость по оси, перпендикулярной к плоскости системной платы, другая дает возможность определять угловую скорость по оси, параллельной плоскости материнской платы. Сочетание в одном устройстве гироскопов обеих конфигураций позволяет получить инерциальную систему, измеряющую угловую скорость по нескольким осям (любые сочетания тангажа, крена и рысканья летательного аппарата). Размеры датчиков обеих конфигураций и оси измерения угловой скорости приведены на рис.1.
Как правило, подобные гироскопы выпускаются в герметичных керамических LCC корпусах которые можно устанавливать на системные платы. Датчик состоит из пяти основных компонентов:
Кремниевый кольцевой МЭМС-сенсор, микросхема и кремниевое основание размещены в герметичной части корпуса с вакуумом, частично заполненным азотом. Это дает серьезные преимущества перед сенсорами, которые поставляются в пластиковых корпусах, которые имеют определенные ограничения чувствительности в зависимости от уровня влажности. Кремниевый кольцевой МЭМС-сенсор Диаметр кремниевого МЭМС-кольца равен 3 мм., толщина – 65 мкм. Его изготавливают методом глубокого реактивного ионного травления объемных кремниевых структур на 5” пластинах. Кольцо поддерживается в свободном пространстве восемью парами симметричных спиц, которые исходят из твердого концентратора диаметром 1 мм. в центре кольца. Процесс объемного травления кремния и уникальная технология изготовления кольца позволяют получить хорошие геометрические свойства, необходимые для точного баланса и термической стабильности сенсорного кольца. В отличие от других гироскопов здесь нет мелких расхождений, создающих проблемы с интерференцией и трением. Указанные особенности существенно определяют стабильность датчика при колебаниях температуры, вибрации или ударе. Еще одним преимуществом подобной конструкции является ее «врожденный» иммунитет к ошибкам, которые датчики могут выдавать под влиянием ускорения, или «g – чувствительности». Пленочные приводы и преобразователи прикреплены к верхней поверхности кремниевого кольца по периметру и для получения электроэнергии подключены к связующим контактам в центре концентратора через треки на спицах. Это активирует или «заводит» периметр кольца в рабочий режим вибрации на уровне Cos2и с частотой 22 кГц, определяя радиальное перемещение, которое может осуществляться по причине первичного движения привода либо за счет действия кориолиосовой силы, когда гироскоп вращается относительно его оси чувствительности. Существует одна пара приводов первичного движения, одна пара первичных снимающих преобразователей и две пары вторичных снимающих преобразователей. Комбинация сенсорной технологии и восьми вторичных снимающих преобразователей улучшает в датчике соотношение «сигнал/шум», что позволяет получать малошумящие устройства с отличными свойствами по угловому случайному дрейфу гироскопа, которые являются ключевыми для применения в сферах инерциальной навигации (например, стабильность наведения камеры или антенны). Описанную схему можно сравнить с камертонной структурой, содержащей бесконечное количество камертонов, интегрированных в единую балансирующую вибрирующую кольцевую конструкцию. Это обеспечивает наиболее высокую стабильность измерения угловой скорости по времени, температуре, вибрациям и ударам для МЕМС-гироскопов данного класса. Концентратор в центре кольца сенсора установлен на цилиндрическом кремниевом основании диаметром 1 мм., которое связано с кольцом и ASIC с помощью эпоксидной смолы. Микросхема гироскопа имеет габариты 3х3 мм и изготовлена по технологии 0,35 мкм КМОП. ASIC и МЭМС-сенсор (кольцо) разделены физически, но соединены электрической цепью через золотые проводки. В связи с этим в подобной схеме отсутствуют внутренние каналы, что позволяет уменьшить шумовую нагрузку и получить отличные электромагнитные свойства. Керамический корпус датчика изготовлен по технологии LCC и представляет из себя многослойную оксидно-алюминиевую конструкцию с внутренними контактными площадками для разварки, соединенными через корпус с наружными контактными площадками посредством многослойных вольфрамовых межсоединений. Аналогичные интегральные межсоединения есть в крышке гироскопа, что обеспечивает размещение чувствительного элемента датчика внутри щита Фарадея и хорошие электромагнитные показатели гироскопа. При этом внутренние и наружные контактные площадки покрыты гальваническим путем слоем никеля и золота. Корпус включает в себя уплотнительное кольцо, на верхней части которого шовной сваркой приварена металлическая крышка. Сварка произведена электродом сопротивления, что создает полную герметичность конструкции. В отличие от большинства МЭМС-корпусов, доступных сегодня на рынке, при изготовлении корпуса данного устройства используется специально разработанная шовная сварка, при которой исключена возможность образования комочков (брызг) сварки внутри гироскопа. При использовании других технологий сварки сварочные брызги могут попадать на нижние конструкции и негативно влиять на надежность гироскопа за счет воздействия на вибрирующий МЭМС-элемент, особенно в тех местах, где конструкции имеют небольшие зазоры. В корпусе также есть встроенный датчик температуры для обеспечения внешней термокомпенсации. Принцип действия системы гироскопа Описываемые гироскопы обычно являются твердотельными устройствами и не имеют движущихся частей за исключением сенсорного кольца, которое имеет возможность отклоняться. Оно показывает величину и направление угловой скорости за счет использования эффекта «силы Кориолиса». Во время вращения гироскопа силы Кориолиса действуют на кремниевое кольцо, являясь причиной радиального движения по периметру кольца. По периметру кольца равномерно расположены восемь приводов/преобразователей. При этом есть одна пара приводов «первичного движения» и одна пара первичных снимающих преобразователей, расположенных относительно их главных осей (0° и 90°). Две пары вторичных переключающих преобразователей расположены относительно их вторичных осей (45° и 135°). Приводы первичного движения и первичные переключающие преобразователи действуют вместе в замкнутой системе, чтобы возбуждать и контролировать первичную рабочую амплитуду вибрации и частоты (22 кГц). Вторичные снимающие преобразователи распознают радиальное движение на вторичных осях, величина которого пропорциональна угловой скорости вращения, благодаря которой гироскоп обретает угловую скорость. Преобразователи производят двухполосный сжатый передающий сигнал, демодулирующийся обратно в полосы, ширина которых контролируется пользователем одним простым внешним конденсатором. Это дает пользователю возможность полностью контролировать производительность системы и делает преобразование абсолютно независимым от постоянного напряжения или низкочастотных параметрических условий электроники. На рисунках 3 и 4 продемонстрирована структура кремниевого кольца сенсора, показывающая приводы первичного движения «PD» (одна пара), первичные снимающие преобразователи «PPO» (одна пара) и вторичные снимающие преобразователи «SPO» (две пары).
На рисунке 5 схематично показано кольцо, при этом спицы, приводы и преобразователи удалены для ясности. В данном случае гироскоп выключен, кольцо круглое.
В момент, когда датчик находится в выключенном состоянии, в кольце возбуждается движение вдоль его основных осей за счет приводов первичного движения и первичных снимающих преобразователей, воздействуя в замкнутом контуре на систему контроля ASIC. Круглое кольцо принимает в режиме Cos2и эллиптическую форму и вибрирует с частотой 22 кГц. Это показано на Рис.6, на котором гироскоп уже включен, но еще не вращается. На четырех вторичных снимающих узлах расположенных на периметре кольца под углом 45 по отношению к основным осям нет радиального движения.
Если гироскоп подвергается воздействию угловой скорости, то на кольцо действуют силы Кориолиса: по касательной к периметру кольца относительно главных осей. Эти силы деформируют кольцо, что вызывает радиальное движение вторичных снимающих преобразователей. Данное движение, определяемое на вторичных снимающих преобразователях, пропорционально прилагаемой угловой скорости. При этом двухполосный сжатый передающий сигнал демодулируется с учетом основного движения. В итоге получается низкочастотный компонент, который пропорционален угловой скорости.
Рис. 7 Режимы работы сенсорного кольца при вращающемся гироскопе Схема управления всем гироскопом расположена в ASIC.
Рис. 8 Блоковая диаграмма функционирования ASIC-сенсора Подобные датчики обладают миниатюрными габаритами (6,5х1,2 мм) при сверхнизком потреблении энергии (12 мВт). Для них характерен широкий диапазон измерения (до 900 градусов/сек), сверхмалый вес 0,08 грамм и высокая стабильность работы. |