Трехфазный инвертор своими руками
Трехфазный инвертор своими руками
Частотник своими руками — любительская схема преобразователя
-
10 commentsПринцип работы 27 января, 2020

Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу.
Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Как я сам изготовил частотный преобразователь
Я изготовил преобразователь частоты и асинхронный привод для моего товарища. Ему нужен был привод для пилорамы, мощный и хороший. Так как я любил заниматься электроникой, то сразу предложил ему такую схему:
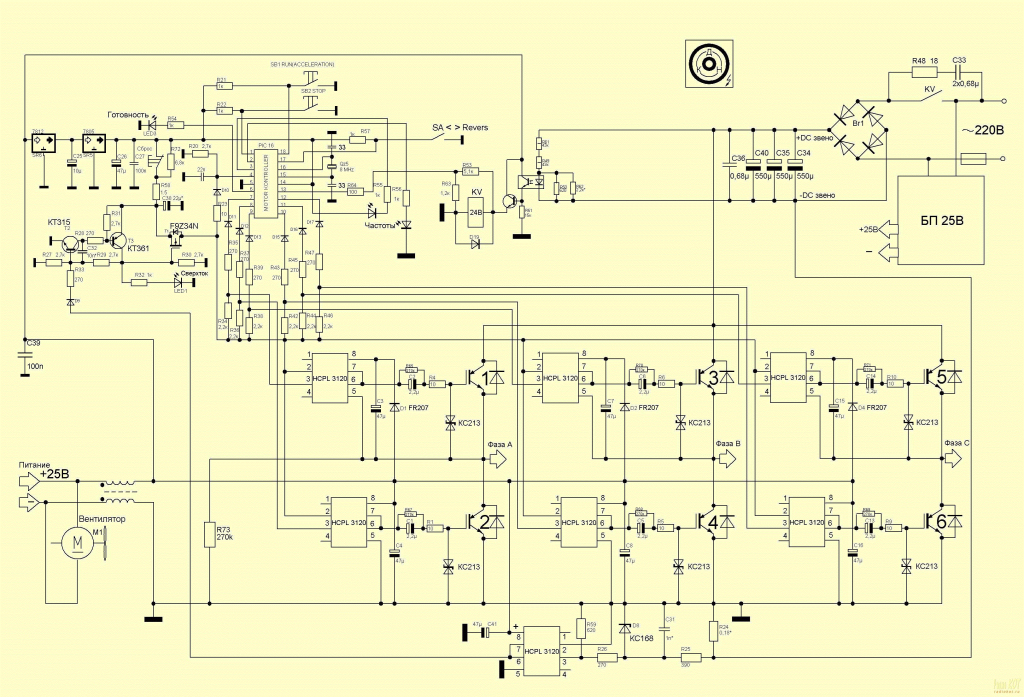
Трехфазный мост на транзисторах с диодами обратной связи я использовал, которые имелись. Управление осуществил через оптодрайвер HCPL 3120 микроконтроллером PIC16F628A. У входа припаял гасящую емкость, чтобы электролиты заряжались плавно. Затем припаял шунтовое реле. Еще установил триггер защиты тока от замыкания и перегрузки. Для управления установил две кнопки и выключатель для обратного вращения.
Силовую часть я собрал на навесном монтаже.
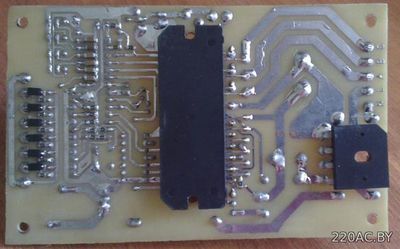
Резисторы, соединил параллельно по 270 кОм с помощью затворных проходных конденсаторов, позади платы их напаял. Моя плата показана на внешнем виде:

Вид этой моей платы с другой стороны:

Для подключения питающего напряжения я собрал блок питания, работающий на импульсах, обратноходовой. Вот привожу схему этого блока питания:

Как я запрограммировал микроконтроллер? Простые моргалки для меня не представляли какой-то проблемы. Получились константы в виде матрицы, над которой работал мой контроллер. Частота и напряжение были заданы этими величинами. Всю схему работы проверил на моторчике вентилятора небольшой мощности, 200 Вт. Эта моя конструкция выглядела так:

Начальные эксперименты дали хороший результат. Затем доработал программу. Раскрутил двигатель на 4 кВт, и пошел собирать управление пилорамой.
При монтаже у нас с товарищем случайно произошло замыкание и сработала защита, проверили ее работу. Мотор на 2 кВт 1500 оборотов с легкостью пилил доски. Сейчас программа еще дорабатывается для раскрутки двигателя выше номинала. Характеристики: частота от 2 до 50 герц с шагом 1,5 герц, синхронная частота, постоянно меняется, разбег от 1500 до 3500 герц, управление скалярного типа U/F, мощность мотора до 5 кВт.
Удерживаем кнопку RUN и разгоняем двигатель. Отпускаем, частота держится на уровне. Когда загорается светодиод, то привод готов к запуску.
Как сделать инвертор самому своими руками?
Вместе с производством заводских инверторов любители делают их сами, своими руками. Здесь нет ничего сложного. Такой преобразователь частоты преобразовывает одну фазу, делает из нее три фазы. Электродвигатель с похожим частотником используют в домашних условиях, мощность его не будет теряться.

Блок выпрямления в схеме расположен в начале. Далее идут фильтры, которые отсекают токовые переменные. Чтобы изготовить данные инверторы применяют транзисторы IGBT.
За тиристорами стоит будущее, хотя и в настоящем они уже применяются давно. Купленный частотник на биполярных транзисторах стоит дорого и мало где применяется (сервоприводы, металлорежущие станки с векторным управлением). Эти приводы как транспортеры и конвейеры, карусельные станки, станции подкачки воды, климатические системы управления — это большая часть от всего применения устройств заводов, где лучше использовать частотники для управления электромоторами с короткозамкнутыми якорями и можно делать управление оборотами двигателя, если подать потенциал, изменяя частоту до 50 герц.
Приведем простые примеры частотных преобразователей, которые тянули мощные электродвигатели тепловозов и электричек, имеющих в своем составе много вагонов товарных платформ, большие станции с насосами напряжением 600 вольт, обеспечивающие городские районы питьевой водой. Очевидно, что данные сильные электродвигатели не подойдут на биполярных транзисторах. Поэтому применяют активные тиристоры типа GTO, GCT, IGCT и SGCT. Они преобразуют из постоянного тока токовую сеть с тремя фазами с хорошей мощностью. Однако, имеются простые схемы на тиристорах простого типа, закрывающиеся током катода обратного. Такие тиристоры не будут действовать в режиме ШИМ, их хорошо применяют в прямой регулировке электромоторов, без тока постоянного размера. Преобразователи частоты на тиристорах в застойные времена были задействованы для моторов на постоянном токе. Фирма Сименс изобрела векторные частотники, преобразившие промышленность до неузнаваемости.
Стоимость всех деталей самодельного инвертора существенно ниже цены заводского устройства.
Такие самодельные устройства хорошо подходят для электромоторов мощностью до 0,75 кВт.
Для чего предназначен инвертор — его принцип действия
Инвертор действует на частоту вращения асинхронных моторов. Моторы переделывают электроэнергию в механическое движение. Вращательное движение преобразуется в движения механические. Это создает большое удобство. Асинхронные моторы очень популярны во многих сторонах жизни людей.
Обороты электродвигателя можно изменять и другими устройствами. Но, у них много недостатков. Они сложны в пользовании, дорого стоят, работают с плохим качеством, разбег регулировки маленький.
Частотный преобразователь для мотора с тремя фазами легко решает эту проблему. Все знают, что пользование частотниками для изменения частоты вращения есть самый хороший и правильный метод. Такой аппарат дает мягкий пуск и торможение, а также контролирует многие процессы, происходящие в моторе. Аварийные ситуации при этом сводятся на нет.

Чтобы плавно и быстро регулировать работу двигателя, специалисты разработали специальную электрическую схему. Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Коэффициент полезного действия его достигает 98%. Это происходит за счет повышения частоты коммутации. Механические устройства не могут выполнить такие функции.
Как регулировать скорость инвертором?
Как частотник может изменять частоту вращения трехфазного электромотора? Сначала он меняет напряжение сетевое. Далее, из него получается нужная амплитуда и частота напряжения, поступает на электромотор.
Разбег интервала регулирования скорости преобразователем большой. Можно изменять вращение мотора в другую сторону. Чтобы двигатель не вышел из строя, нужно брать во внимание данные из его характеристики, допускаемые обороты, мощность.
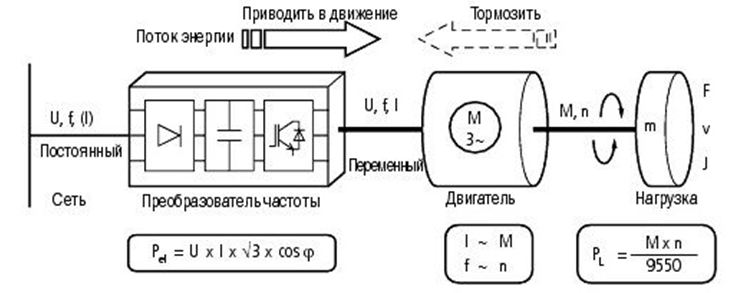
Из чего состоит привод регулирования?

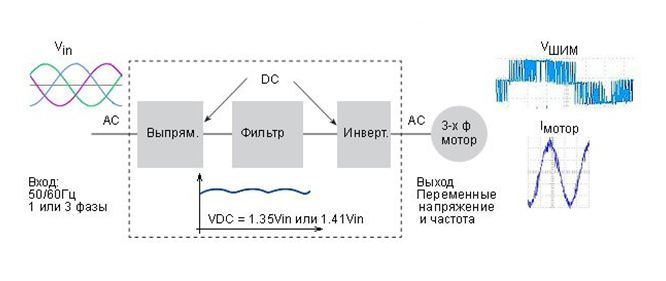
Он имеет в составе три звена:
- выпрямитель, дающий потенциал постоянного тока при включении к питанию электрической сети. Сеть может быть управляемой или нет;
- фильтрующий элемент, который сглаживает выходное напряжение (применяется емкость);
- инвертор, который производит нужную частоту потенциала, крайнего звена возле электромотора.
Режим управления частотников
Их делят на виды управления оборотами двигателя:
- скалярное управление (нет связи с обратной стороны);
- режим векторного управления (связь с обратной стороны имеется, или отсутствует).
В первом случае управляется статор с его магнитным полем. Управление вектором учитывает действие полей магнита ротора и статора, улучшается крутящий момент при разных скоростях вращения. Это и есть основное различие их режимов управления.
Способ векторов точнее и эффективнее. Обслуживать его дороже. Он больше подходит для специалистов с хорошими профессиональными умениями и знаниями. Метод управления скалярного типа наиболее прост в работе. Применяется он с выходными параметрами, не требующими регулировки особой точности.
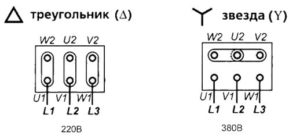
Как подключить инвертор треугольником и звездой?
Когда мы купили инвертор по недорогой цене, то возникает необходимость: подключение его к электромотору самому без специалистов. Сначала надо установить для безопасности автоматический выключатель для обесточивания. Если возникнет короткое замыкание на фазах, то отключится вся система.
Подключить частотник к мотору можно звездой или треугольником.

Когда привод регулирования с одной фазой, то контакты электромотора присоединяют треугольником. Тогда мощность не потеряется. Мощность этого преобразователя частоты будет не более 3 кВт.
Инверторы с тремя фазами технически наиболее современны. Они питаются от заводских трехфазных сетей, подключаются звездой.
Для ограничения тока пуска и уменьшения момента пуска при пуске электромотора свыше 5 кВт можно использовать способ включения треугольник и звезда.
При включении статора применяется схема звезды, а если обороты двигателя нормальные, то переходят на вариант треугольника. Но это используется при существовании возможности соединения по двум схемам.
Отмечаем, что в варианте звезда-треугольник большие перепады тока будут всегда. При переключении на вторую схему обороты двигателя сильно снизятся. Для восстановления скорости вращения надо повысить силу тока.
Большой применяемостью оказывают пользу частотники для моторов мощностью до 8 кВт.
Применение инверторов нового поколения
Современные частотные преобразователи делаются с применением таких устройств как микроконтроллеры. Это значительно повышает функции инверторов в алгоритмах управления и контролирования с точки зрения безопасности работ.
Частотники имеют успешное применение в областях производства:
- в водоснабжении, снабжении теплом при изменении скорости подачи помпы холодного и горячего водоснабжения;
- в заводских условиях машиностроения;
- в легкой и текстильной промышленности;
- в энергетике и производстве топлива;
- для насосов канализации и скважин;
- в технологических процессах для автоматики управления.
Чтобы управлять и контролировать частотники изготовитель прибора предлагает созданную программу, которая будет всегда иметь связь с контроллером посредством порта, будет показывать на мониторе состояние и позволит производить управление. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Данные обмениваются в три этапа:
- Идентификация.
- Инициализация.
- Управление и контроль.
Стоимость блоков питания бесперебойного напряжения имеет зависимость от того, есть ли в нем частотный преобразователь. За такими устройствами будущее. Отрасли экономики и энергетики будут быстрее развиваться благодаря новым современным устройствам.
3-ФАЗНЫЙ ИНВЕРТОР ОТ 220 В
Представляем довольно простую конструкцию небольшого инвертора для трехфазного двигателя, мощностью около 400 Вт. Инвертор питается от одной фазы переменного напряжения стандартных 220 В. На выходе выдается трехфазное напряжение 3x 220 В.
Схема трёхфазного инвертора
Тут основной элемент управления — FNA41560, который на Али стоит всего около 150 рублей. Правда стоимость остальных элементов гораздо больше. Самые дорогие компоненты — конденсаторы и дроссель. Ну да хватит о деньгах, перейдём к самой схеме 3-фазного преобразователя питания. На входе инвертора имеется схема коррекции коэффициента мощности, которая гарантирует что ток, потребляемый из сети, не искажается и находится в фазе с напряжением.
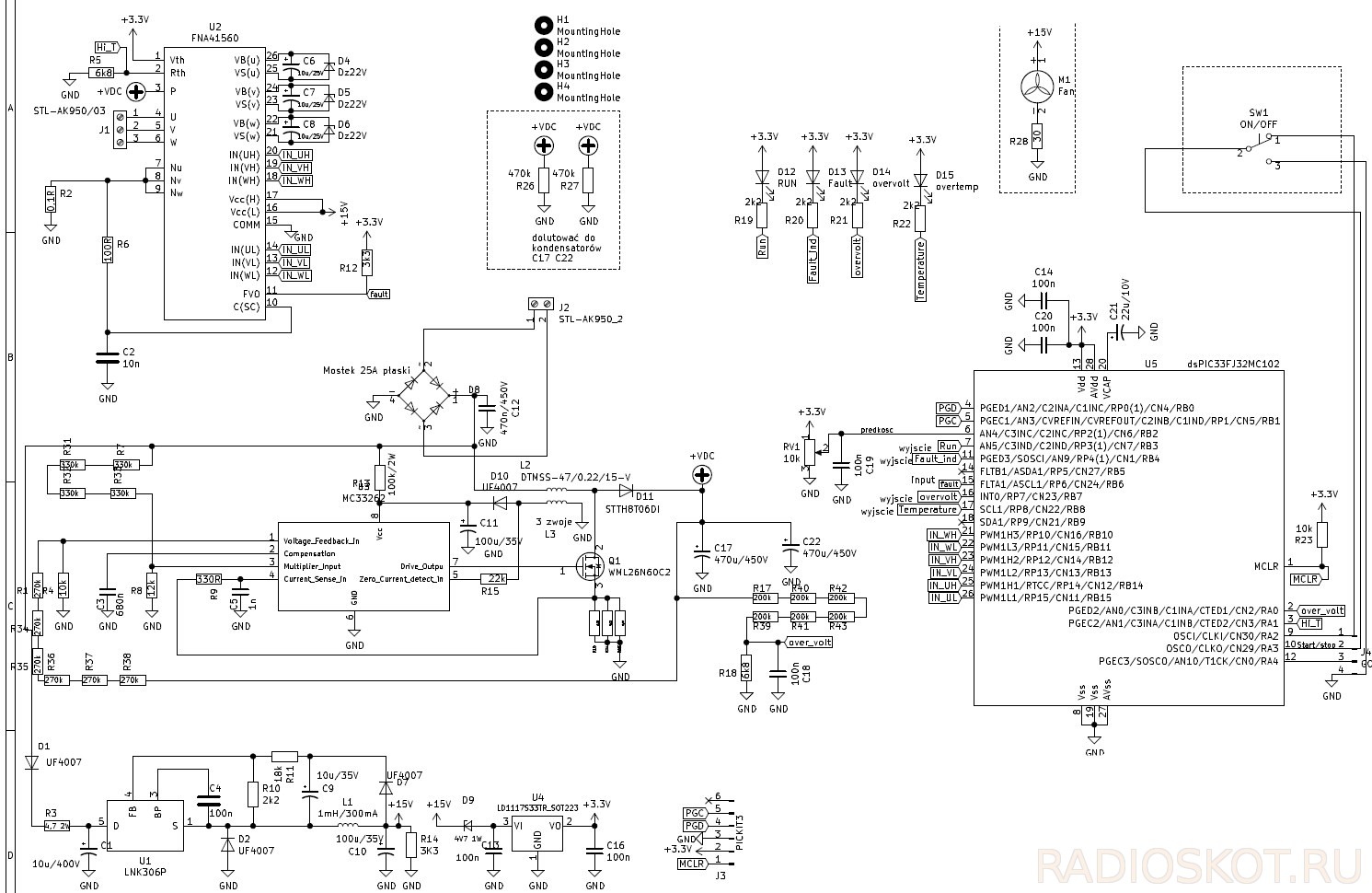
Напряжение на конденсаторах фильтра составляет приблизительно 430 В без нагрузки и падает до 400 В при нагрузке. В инверторе транзисторы переключаются с частотой 5 кГц, потому что для этой частоты и оптимизирован чип FNA41560, дедтайм для транзисторов составляет около 1,2 мкс (см. осциллограммы).

Инвертор имеет защиту от высокой температуры (свыше 105 С), короткого замыкания (от 5 А), высокого напряжения на конденсаторах фильтра (460 В). Защита от короткого замыкания автоматически сбрасывается в конце каждого цикла ШИМ (действует как ограничение тока). Это можно изменить в регистре микроконтроллера PIC33FJ32MC102 P1FLTACON на режим удержания. В режиме этом генераторы ШИМ отключаются и останавливаются до удаления проблемы. Частота регулируется многооборотным потенциометром, с разрешением 0,1 Гц. Регулируемый частотный диапазон от 1 Гц до 80 Гц. Полезный диапазон начинается с 5 Гц. Для генерации выходного сигнала использовался алгоритм VSM-пространственной векторной модуляции (как звучит-то!), который позволяет максимально использовать напряжение постоянного тока, подаваемое на модуль FNA41560.

Различия в формах сигналов, генерируемых с помощью SPWM и SVM, следующие. В случае SPWM максимальное межфазное напряжение на выходе инвертора может быть не более v3 / 2 x Udc, для SVM равно Udc — если не учитывать потери в транзисторах. Фактически, метод SVM дает примерно на 15% более высокое выходное напряжение по сравнению с методом синусоидальной ШИМ.
Следует помнить, что источник питания схемы не изолирован от сети, и при использовании следует соблюдать особые меры предосторожности. Отсутствие гальванической развязки потенциально опасно для жизни.
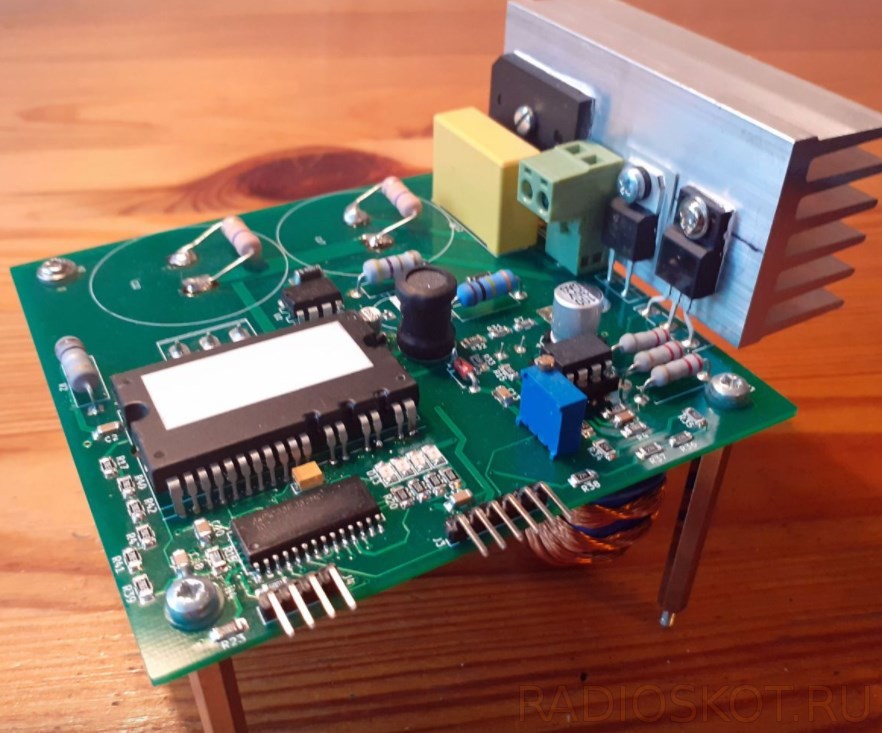
Сборку устройства предлагается начать с пайки, а затем запуска PFC-части, припаять интегральную микросхему MC33262, выпрямительный мост, диод D11, транзистор Q1 и дроссель, фильтрующие конденсаторы C17 и C22, к которым нужно припаять резисторы 470 кОм. Обмотка (3 катушки) должна быть намотана на дроссель, который будет питать микросхему MC33262. Для намотки использовался кабель от компьютерной сети. Конец и начало обмоток важны в плане полярности и должны быть подключены, как указано в инструкции по применению.

Питание инвертора следует подавать через термисторы, чтобы ограничить ток, протекающий через диод D11, или использовать другое решение, ограничивающее пусковой ток. В данном случае применено 2 термистора NTC6D-15 с максимальным током 5 А. Прямое подключение к сети может повредить диод D11. После пайки элементов схемы PFC, припаяны две последовательно включенные лампы накаливания 100W / 220V к конденсаторам, таким образом проверяем, работает ли PFC блок. Напряжение на лампочках должно быть 400 В.
Следующим шагом была пайка и проверка работы бестрансформаторного блока питания, построенного на микросхеме LNK306. На выходе его следует замерить напряжение, которое должно быть 15 В. В конце спаять FNA41560 и микроконтроллер, который должен быть запрограммирован в схеме. Разъем Pickit3, совместимый с J3, как раз и используется для программирования.

Для запуска схемы, помимо естественно включения питания, необходимо подать логическую единицу с выхода RA2 на вход RA3, после чего инвертор запускается до скорости, установленной потенциометром. Подключение RA3 к земле вызывает остановку инвертора — отключение транзисторов.
Важно управлять запуском или остановкой инвертора с выхода RA2 (контакт 1 на J4, как показано на схеме), потому что в случае слишком высокой температуры или других помех состояние R2 меняется на низкое, и инвертор выключается.
Обращает на себя внимание выход FVO (контакт 11) микросхемы FNA41560, который закорочен на массу, когда напряжение питания меньше 12 В, а также когда схема не запитана. Об этом свидетельствует светодиод, во время запуска и начальных тестов, когда источник питания от программатора pickit3 подключен к плате нужно помнить, что когда этот светодиод горит, на выходе микроконтроллера не генерируются сигналы ШИМ.

Чтобы избавиться от этой ошибки и получить сигналы ШИМ на выходе микроконтроллера, временно отключите питание от программатора и подключите 15 В к FNA41560. Конечно, выполняем эти действия только тогда, когда инвертор отключен от сети. Максимальное выходное напряжение инвертора получается при частоте 60 Гц. Для низких частот напряжение от 1 Гц до 5 Гц является постоянным. Выше 5 Гц U / f = константа увеличивается.

Схема была собрана на печатной плате размером 100 x 100 мм. Программа управления написана на C в среде MPLABX.
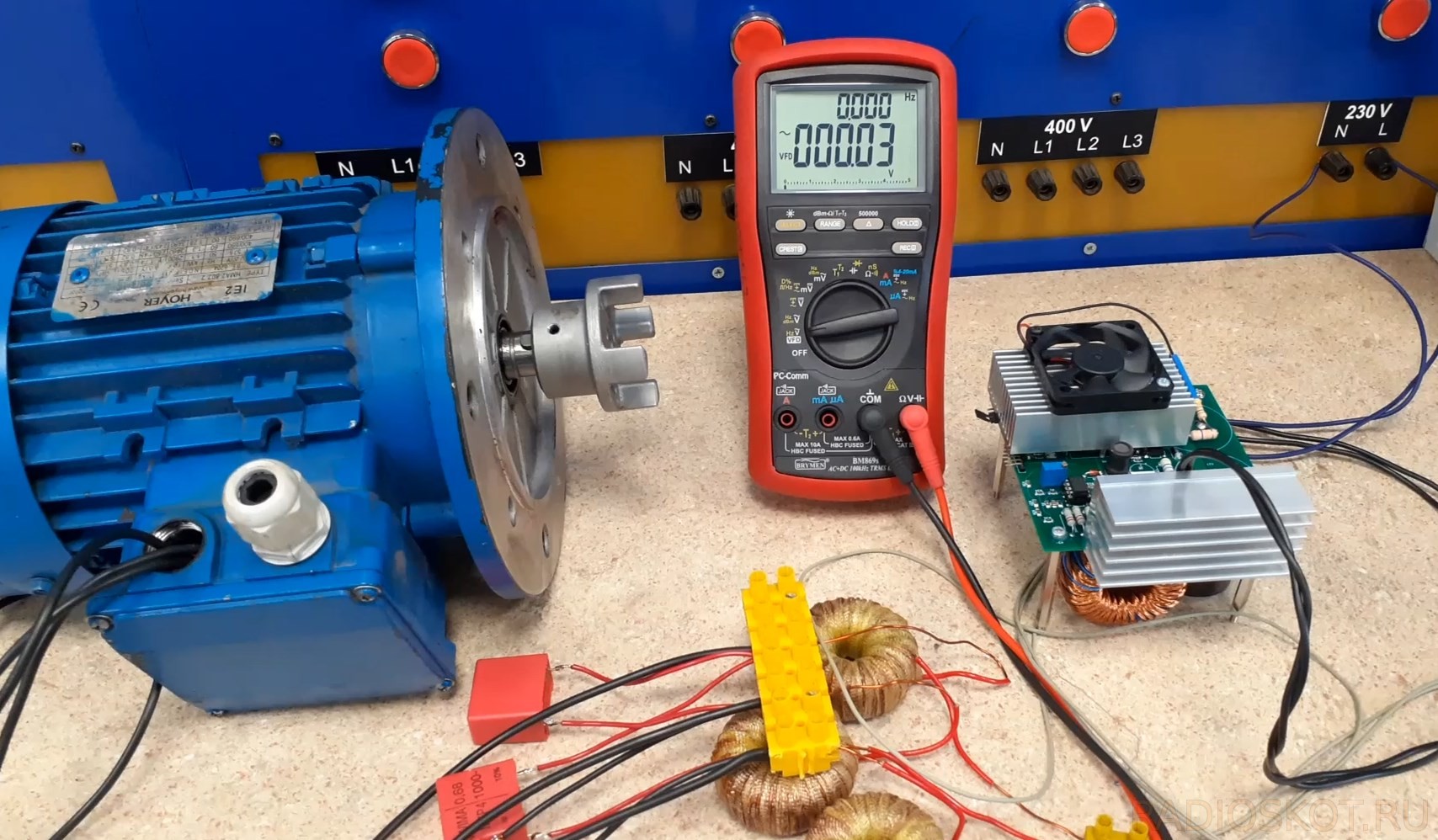
На фото видно,что между инвертором и двигателем включен LC-фильтр 3x L = 1,5 мГн и 3x C = 0,68 мкФ, что смягчает работу.
В заключение хотелось бы добавить, что помимо пусковых термисторов инвертор должен питаться от помехозащитного фильтра. Схема принципиальная 3-х фазного инвертора, программное обеспечение и рисунок печатной платы находятся в приложении. Оригинал
Трехфазный инвертор своими руками
Простой преобразователь частоты для асинхронного электродвигателя.
Автор: Сергей М.
Опубликовано 11.12.2012
Создано при помощи КотоРед.
Первым был ресторан – зимой холодный воздух должен строго дозировано дуть на разгорячённых посетителей, а летом наоборот –замерзших от холодного мороженого плавно согревать жарким воздухом с улицы. Без инвертора никак не обойтись.
Второй хочет стричь лохматых овец , но вот беда машинка трехфазная. А в поле только одна да и та не 220в. Опять нужен инвертор.
Третий вообще наждачный камень , сверлильный станок и намоточный –захотел прицепить к двигателю.
В конце концов оглядевшись по сторонам я увидел – все…все делают инверторы японцы, французы, немцы …. , только я ещё не имею своего точила для отверток. И мало того все приличные фирмы уже написали , как это делать.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже . Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема. 
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см 2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид. 
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов. 
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Для чего нужен частотник и как сделать его своими руками для трехфазного электродвигателя
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя.
Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод. На сегодняшний день частотники производят многие фирмы, но есть немало энтузиастов, создающих преобразователи своими руками.
Назначение и принцип работы инвертора
 Инвертор управляет скоростью вращения асинхронных электродвигателей, т. е. двигателей, преобразующих энергию электрическую в механическую. Полученное вращение приводными устройствами трансформируется в другой вид движения. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Инвертор управляет скоростью вращения асинхронных электродвигателей, т. е. двигателей, преобразующих энергию электрическую в механическую. Полученное вращение приводными устройствами трансформируется в другой вид движения. Это очень удобно и благодаря этому асинхронные электродвигатели приобрели большую популярность во всех областях человеческой жизни.
Важно отметить, что скорость вращения могут регулировать и другие устройства, но все они имеют множество недостатков:
- сложность в использовании,
- высокую цену,
- низкое качество работы,
- недостаточный диапазон регулирования.
Многим известно, что использование частотных преобразователей для регулировки скорости является самым эффективным методом. Это устройство обеспечивает плавный пуск и остановку, а также осуществляет контроль всех процессов, которые происходят в двигателе. Риск возникновения аварийных ситуаций, при использовании преобразователя частоты, крайне незначителен.
Для обеспечения плавной регулировки и быстродействия разработана специальная схема частотного преобразователя. Его использование в значительной мере увеличивает время непрерывной работы трехфазного двигателя и экономит электроэнергию. Преобразователь позволяет довести КПД до 98%. Это достигается увеличением частоты коммутации. Механические регуляторы на такое не способны.
Регулировка скорости инвертором
Первоначально он изменяет поступающее из сети напряжение. Затем из преобразованного напряжения формирует трехфазное, необходимой амплитуды и частоты, которое подается на электродвигатель.
Диапазон регулировки достаточно широкий. Есть возможность крутить ротор двигателя и в обратном направлении. Во избежание его поломки необходимо учитывать паспортные данные, где указаны максимально допустимые обороты и мощность в кВт.
Составные части регулируемого привода
Ниже представлена схема преобразователя частоты.
Он состоит из 3 преобразующих звеньев:
- выпрямителя, формирующего напряжение постоянного тока при подключении к питающей электросети, который может быть управляемым или неуправляемым,
- фильтра, сглаживающего уже выпрямленное напряжение (для этого применяют конденсаторы),
- инвертора, формирующего нужную частоту напряжения, являющегося последним звеном перед электродвигателем.
Режимы управления
Частотники различают по видам управления:
- скалярный тип (отсутствие обратной связи),
- векторный тип (наличие обратной связи, или ее отсутствие).
При первом режиме подлежит управлению магнитное поле статора. В случае векторного режима управления учитывается взаимодействие магнитных полей ротора и статора, оптимизируется момент вращения при работе на разной скорости. Это является главным различием двух режимов.
Кроме этого, векторный способ более точен, эффективен. Однако в обслуживании — более затратен. Рассчитан он на специалистов с большим багажом знаний и навыков. Скалярный способ проще. Он применим там, где параметры на выходе не требуют точной регулировки.
Подключение инвертора «звезда — треугольник»
После приобретения инвертора по доступной цене возникает вопрос: как подключить его к двигателю своими руками? Прежде чем это сделать будет нелишним поставить обесточивающий автомат. В случае возникновения короткого замыкания хотя бы в одной фазе, вся система будет немедленно отключена.
Подключение преобразователя к электродвигателю можно осуществить по схемам «треугольник» и «звезда».
Если регулируемый привод однофазный, клеммы электродвигателя подключают по схеме «треугольник». В этом случае потерь мощности не происходит. Максимальная мощность такого частотника 3 кВт.
Трехфазные инверторы более совершенны. Они получают питание от промышленных трехфазных сетей. Подключаются по схеме «звезда».
Чтобы ограничить пусковой ток и снизить пусковой момент во время запуска электродвигателя мощностью более 5 кВт используют вариант переключения «звезда-треугольник».
При пуске напряжения на статор используется вариант «звезда». Когда скорость двигателя станет номинальной, питание переключается на схему «треугольник». Но такой способ применяется там, где существует возможность подключения по обеим схемам.
Важно отметить, что в схеме «звезда-треугольник» резкие скачки токов неизбежны. В момент переключения на второй вариант скорость вращения резко снижается. Чтобы восстановить частоту оборотов, необходимо увеличить силу тока.
Наибольшей популярностью пользуются преобразователи для электродвигателей мощностью от 0,4 кВт до 7,5 кВт.
Инвертор своими руками
Наряду с выпуском промышленных инверторов многие изготавливают их своими руками. Особой сложности в этом нет. Такой частотник может преобразовать одну фазу в три. Электродвигатель с подобным преобразователем можно использовать в быту, тем более что мощность его не теряется.
Выпрямительный блок идет в схеме первым. Затем идут фильтрующие элементы, отсекающие переменную составляющую тока. Как правило, для изготовления таких инверторов используют IGBT-транзисторы. Цена всех составляющих частотника, изготовленного своими руками, намного меньше цены готового производственного изделия.
Частотники подобного типа пригодны для электродвигателей мощностью от 0,1 кВт до 0,75 кВт
Использование современных инверторов
Современные преобразователи производятся с использованием микроконтроллеров. Это намного расширило функциональные возможности инверторов в области алгоритмов управления и контроля за безопасностью работы.
Преобразователи с большим успехом применяют в следующих областях:
- в системах водоснабжения, теплоснабжения для регулирования скорости насосов горячей и холодной воды,
- в машиностроении,
- в текстильной промышленности,
- в топливно-энергетической области,
- для скважинных и канализационных насосов,
- для автоматизации систем управления технологическими процессами.
Цены источников бесперебойного питания напрямую зависят от наличия в нем частотника. Они становятся «проводниками» в будущее. Благодаря им, малая энергетика станет наиболее развитой отраслью экономики.
Частотный привод 5-200 Гц (10-400 Гц)
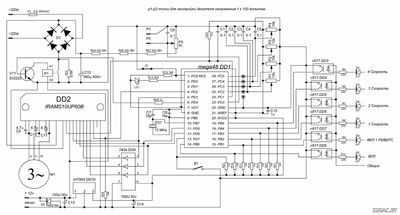
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
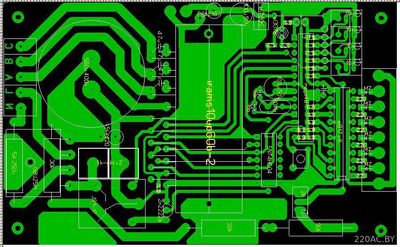
Проект в layout
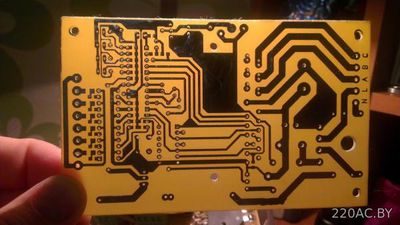
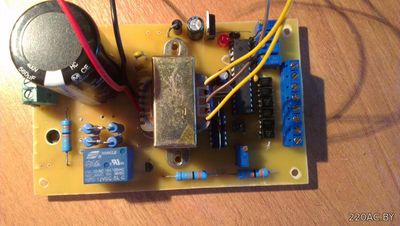
Ниже фото того, что у меня получилось
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
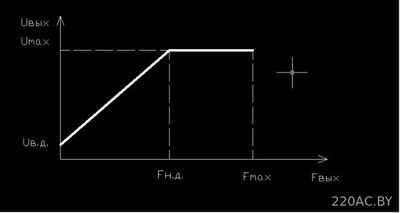
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
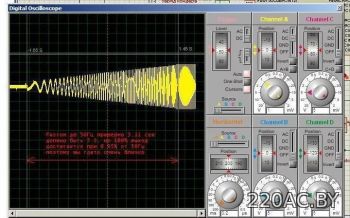
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Разрабатываем частотник. Часть первая, силовая часть.

Самостоятельная разработка частотника для трехфазного электродвигателя, дело достаточно затратное и хлопотное. Но если есть желание и интерес к данной теме огромен, то можно попробовать. Данный пост не
претендует на оригинальность и писатель из меня честно говоря плохой. Итак обо всем по порядку.
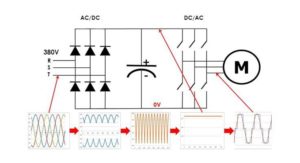
Начнем с общей структурной схемы.

Данная структурная схема построена по так называемой схеме двойного преобразования. Трехфазное напряжение 380В частотой 50 Гц поступает на вход неуправляемого выпрямителя. На выходе выпрямителя напряжение составляет около 540 В. Это и есть первый этап преобразования. На втором этапе напряжение при помощи инвертора преобразуется в широтно-модулированные импульсы, которые и поступают на обмотки электродвигателя. Статорные обмотки имеют активно-индуктивный характер сопротивления и являются фильтрами, сглаживающими ток. Среднее значение тока будет зависеть от среднего значения приложенного напряжения, то есть от соотношения длительностей внутри периода ШИМ. Блок управления реализует основные алгоритмы управления инвертором. Обеспечивает диагностику силового модуля, а также выполняет функции противоаварийной защиты. Блок питания предназначен для питания цепей управления.
Выпрямитель.
Схема выпрямителя предельно проста.

На вход силового блока поступает трехфазное напряжение сети амплитудой 380 В, и частотой 50 Гц. Для защиты от перенапряжения в схеме используются варисторы VR1- VR3. Далее входное напряжение поступает на выпрямитель с промежуточным звеном постоянного тока. Выпрямитель 36МТ160 представляет собой трехфазную мостовую схему (т.н схема Ларионова) конструктивно выполненную в одном модуле.
Во время зарядки конденсатора промежуточного контура протекает очень большой кратковременный ток. Это может вывести из строя выпрямитель. Ток зарядки ограничивается включением балластного резистора R4 последовательно с конденсаторами DC-звена, который активизируется только при включении преобразователя. После зарядки конденсаторов резистор шунтируется, контактными реле К1. Большая емкость конденсаторов требуется для сглаживания напряжения промежуточного звена. После выключения инвертора из сети, конденсаторы сохраняют высокое напряжение в течение определенного времени.
Вот что получилось в итоге. 
Блок питания.
Собран на микросхеме UC3843. Вообще, что касается блока питания, то вовсе не важно какой будет использован.
Хоть самодельный хоть купленный. Главное, на мой взгляд, по возможности питание драйвера IGBT и питания блока управления было от отдельных обмоток трансформатора.


Инвертор.
Схема инвертора.

IGBT-драйвер собран на транзисторах FGA25N120 и связке оптопары TLP250 и микросхемы TC4420. Что касается микросхемы TC4420 то ее мне посоветовал использовать один мой друг который занимается усилителями «класса D».


Подопытный кролик Электродвигатель.
Двигатель взял для начала малой мощности. Закрепил на нем инкрементальный энкодер «RO6345» фирмы «IFM».

Все это протестировано, проверено и ждет изготовления блока управления. Будем надеется что у меня хватит терпения, времени и сил довести этот проект до работающего прототипа.